




دانشمندان یک ربات چهارپا با الهام از طبیعت ساختهاند که مانند هیچ ربات دیگری بالا میرود. این ربات صخرهنورد به کمک مکانیزمی منحصر به فرد که هم بسیار موثر و هم نسبتا ساده است، به سطوح عمودی ناهموار میچسبد.در حالی که برخی رباتهای آزمایشی از سیستمهای مکشی برای چسبیدن به سطوح صاف استفاده میکنند، این فناوری روی سطوح ناهموار مانند سنگها که نمیتوان مهر و موم ایجاد کرد، کارایی ندارد.
این بخش به این معنی است که برخی رباتهای آزمایشی برای چسبیدن به سطوح صاف از سیستمهای مکشی استفاده میکنند. این سیستمها به وسیله ایجاد خلأ (مکش) بین سطح و ربات، باعث چسبیدن ربات به سطح میشوند. اما وقتی سطح ناهموار باشد، مانند سطوح سنگی یا صخرهها، این سیستم مکشی نمیتواند به خوبی کار کند زیرا خلأ لازم برای چسبیدن ایجاد نمیشود. به عبارت دیگر، سطح ناهموار اجازه نمیدهد که یک مهر و موم کامل بین ربات و سطح تشکیل شود تا مکش لازم ایجاد شود و ربات به سطح بچسبد.

بیشتر بخوانید:
- ربات انساننمای تسلا کارهای واقعیتری انجام میدهد [+ لینک ویدئو]
- رونمایی از ربات میکرو جراحی جدید سونی که میتواند دانه ذرت را بخیه بزند [+ویدئو]
ربات صخرهنورد چگونه عمل میکند
یکی از جایگزینها استفاده از چنگکهای میکروسپاین است. این چنگکها شامل مجموعهای از قلابهای کوچک تیز هستند که در شکافهای کوچک سطحی که صعود میکنند گیر میکنند. این قلابها هنگام بلند شدن چنگک برای قدم بعدی از سطح جدا میشوند.
برخی از چنگکهای میکروسپاین غیر فعال هستند و به وزن بدن آویزان ربات برای نگه داشتن چنگک تکیه میکنند. این نوع چنگکها بر روی دیوارهای نسبتا صاف کار میکنند اما در مواجهه با سطوح ناهموار مانند صخرهها که نیاز به استراتژی صعود متنوعتری دارند، مشکل دارند.
این بخش به این معنی است که برخی از چنگکهای میکروسپاین که در رباتها استفاده میشوند، غیر فعال هستند و برای نگه داشتن خود به وزن ربات وابستهاند. به عبارت دیگر، این چنگکها بدون نیاز به نیروی اضافی یا موتور، فقط با وزن خود ربات در جای خود قرار میگیرند. این چنگکها روی دیوارهای نسبتاً صاف به خوبی کار میکنند، اما وقتی با سطوح بسیار ناهموار مانند صخرهها مواجه میشوند، به دلیل تغییرات زیاد در شکل و زاویه سطح، نمیتوانند به طور مؤثر عمل کنند و نیاز به یک استراتژی صعود متنوعتر و پیچیدهتر دارند تا بتوانند به درستی بچسبند و ربات را نگه دارند.
چنگکهای میکروسپاین فعال با استفاده از محرکهای الکتریکی این محدودیت را دور میزنند. این محرکها حلقهای از قلابها را به صورت هدفمند در سطح فرو میبرند و چنگکی موتوریزهای را ایجاد میکنند که در هر جهتی کار میکند. با این حال، این نوع چنگکها حجیم، پرمصرف و مکانیکی پیچیده هستند و سرعت صعود نسبتا کُندی دارند.
اینجاست که ربات چهارپای لوریس وارد میشود
این ربات صخرهنورد که به نام یک جانور صعودکننده و همچنین عبارت “ربات مشاهدهگر سبک برای شیبهای ناهموار” نامگذاری شده است، توسط پاول نادان، اسپنسر بکوس، آرون ام. جانسون و همکارانشان در آزمایشگاه روبومکانیک دانشگاه کارنگی ملون ساخته شده است.
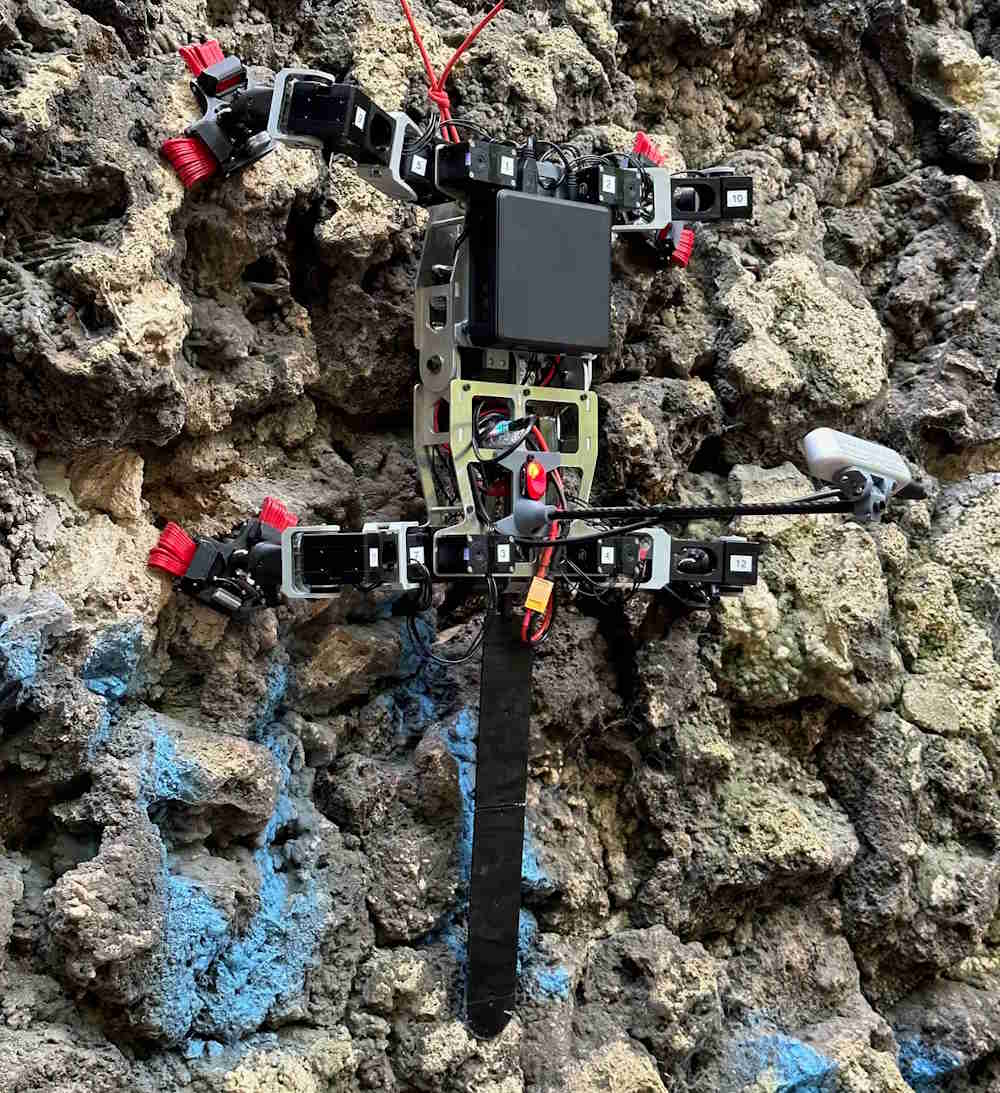
در انتهای هر کدام از چهار پای این ربات یک چنگک میکروسپاین پراکنده قرار دارد که شامل دو گروه قلاب است که در زاویهای قائم نسبت به یکدیگر قرار گرفتهاند. چنگک به وسیله یک مفصل مچ غیر فعال به پا متصل است که به این معنی است که چنگک در پاسخ به حرکات پا آزادانه حرکت میکند.
با استفاده از یک دوربین تشخیص عمق و یک ریزپردازنده روی بورد، ربات پاهای خود را به صورتی استراتژیک جلو میبرد که وقتی چنگک یک پا سطح صعود را میگیرد، چنگک پای مخالف – در سمت دیگر بدن، در انتهای دیگر بدن – نیز همین کار را انجام میدهد.

تا زمانی که این دو پای مورب به چنگکهای خود تنش درونی وارد کنند، این چنگکها به طور محکم به سطح متصل میمانند. در همین حال، دو پای مخالف دیگر ربات آزاد هستند تا قدم بعدی را به سمت بالا بردارند. این یک استراتژی صعود الهام گرفته از حشرات است که به آن چنگکگیری درونی هدایتشده (DIG) میگویند.
به گفته محققان، لوریس سبکی، سرعت، کارایی انرژی و سادگی چنگکهای میکروسپاین غیر فعال را با نگهداری محکم و تطبیقپذیری چنگکهای فعال ترکیب میکند. به عنوان یک مزیت اضافی، این ربات به گونهای طراحی شده که ساخت آن آسان و ارزان است.
شما میتوانید عملکرد لوریس را در ویدیوی زیر مشاهده کنید.
بیشتر بخوانید: